Norges landbrukshøgskole, Institutt for tekniske fag
Videregående modellering og regulering
Labøving: Estimering av prosessforstyrrelse vha. Kalman-filter
Hva laben går ut på
I denne øvingen skal dere vha. et Kalman-filter estimere lastmomentet som virker på en likestrømsmotor, se figur 1. Kalman-filter-uttrykkene skal implementeres i en HiQ-node i LabVIEW, som kommuniserer med motoren via I/O-utstyret FieldPoint.
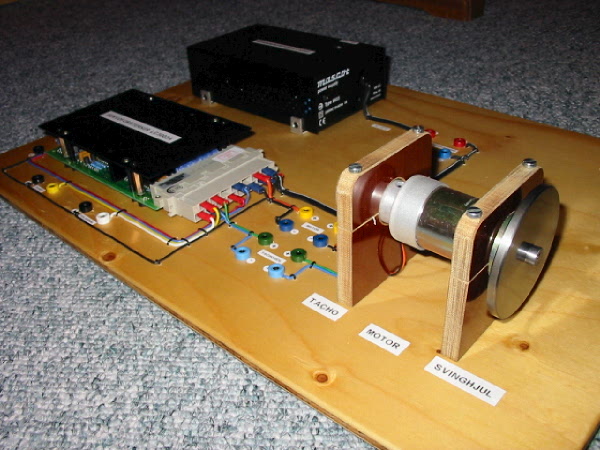
Figur 1
Praktiske opplysninger
Tid: Tors 18.4 kl. 1100-1400.
Rom: Datasalen ved ITF (i kjelleren).
Lærer'n hjelper til med oppkoplingen av labutstyret og gir nærmere informasjon om utstyret.
Tekniske saker
- VI'en dere lager, kan baseres på fila io.vi i llb-fila io.llb. som benytter FieldPoint-konfigureringsfila iak210202.iak. Lærer'n forklarer utstyrets og programmenes virkemåte.
- Selve Kalmanfilteret skal implementeres i en HiQ-node, som kan benyttes på noenlunde samme måte som Formula Node. I motsetning til Formula Node har HiQ-noden støtte for lineær-algebraiske funksjoner og operasjoner, bl.a. matrise-vektor-beregninger (á la Matlab). Her er informasjon om HiQ-noden.
Oppgaver
Anta at motorens matematiske modell er lineær og på formen
x(s) = [1/(T*s+1)]*[K*u(s) - m(s)]
der x [V]er hastighetsmålingen, u [V] er styresignalet til motoren, og m [V] er en variabel som tilsvarer (er proporsjonal) med lastmomentet på motoren. (m har her enhet volt, men vi bryr oss ikke her med hvilket moment den tilsvarer.) K og T er konstante parametre. Denne modellen er en "black-box"-modell for motoren, men den uttrykker motorens dynamiske egenskaper på en god måte. Hadde vi satt opp en modell basert på momentbalanse og elektriske sammenhenger, ville vi fått en modell som under vanligvis akseptable forutsetninger kan omformes til en modell på formen angitt ovenfor.
- Finn K og T ut fra et enkelt eksperiment på motoren. Bruk disse
verdiene i resten av oppgaven.
- Estimer m fortløpende (i sann tid) vha. et augmentert Kalmanfiler
basert på antakelsen at m er (stort sett) konstant. Kalmanfilteret skal
implementeres i en HiQ-node. Målingen som benyttes i Kalmanfilteret, er
hastighetsmålingen x. Tips: Sett i utgangspunktet målestøyvariansen R
lik 0,01 og prosesstøyvariansen Q lik 0,01. Q kan brukes som
tuningsfaktor for Kalmanfilteret.
Sett på et lastmoment (brems motoren med hånden). Virker Kalmanfilteret som forventet (mht. estimering av m)?
Sist oppdatert 18.4.02 av Finn Haugen (e-post-adresse: finn@techteach.no).